Efficient exploration and mapping in unknown indoor
environments is a fundamental challenge, with high stakes in time-critical
settings. In current systems, robot perception remains confined to line-of-sight;
occluded regions remain unknown until physically traversed, leading to inefficient
exploration when layouts deviate from prior assumptions.
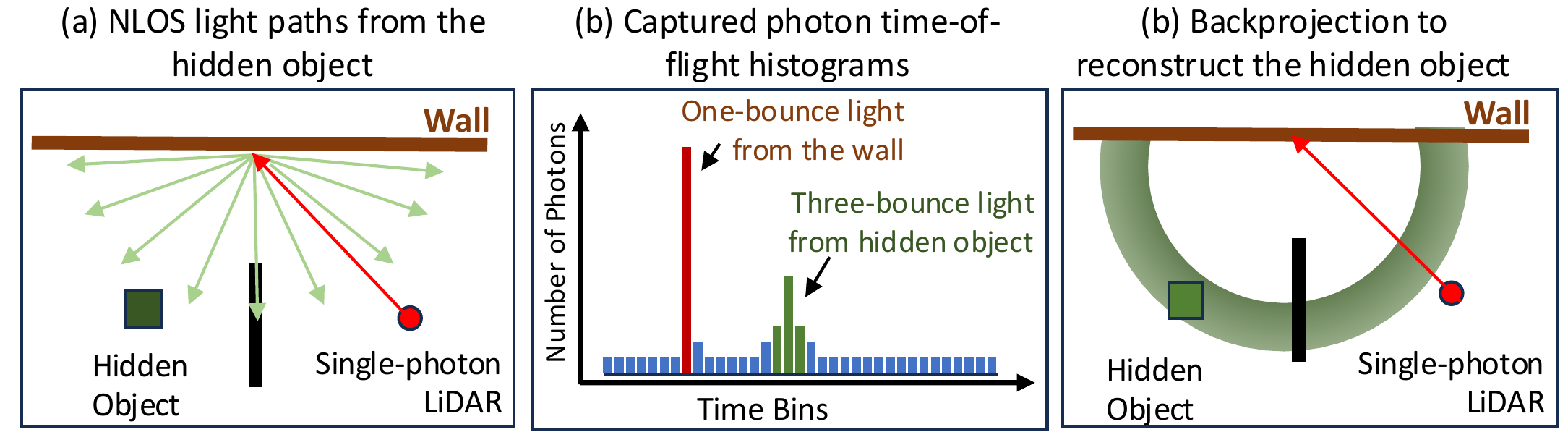
In this work, we bring non-line-of-sight (NLOS) sensing to robotic exploration.
We leverage single-photon LiDARs, which capture time-of-flight histograms that encode
the presence of hidden objects -- allowing robots to look around blind corners.
Recent single-photon LiDARs have become practical and portable, enabling deployment
beyond controlled lab settings. Prior NLOS works target 3D reconstruction in static,
lab-based scenarios,
and initial efforts toward NLOS-aided navigation consider simplified geometries.
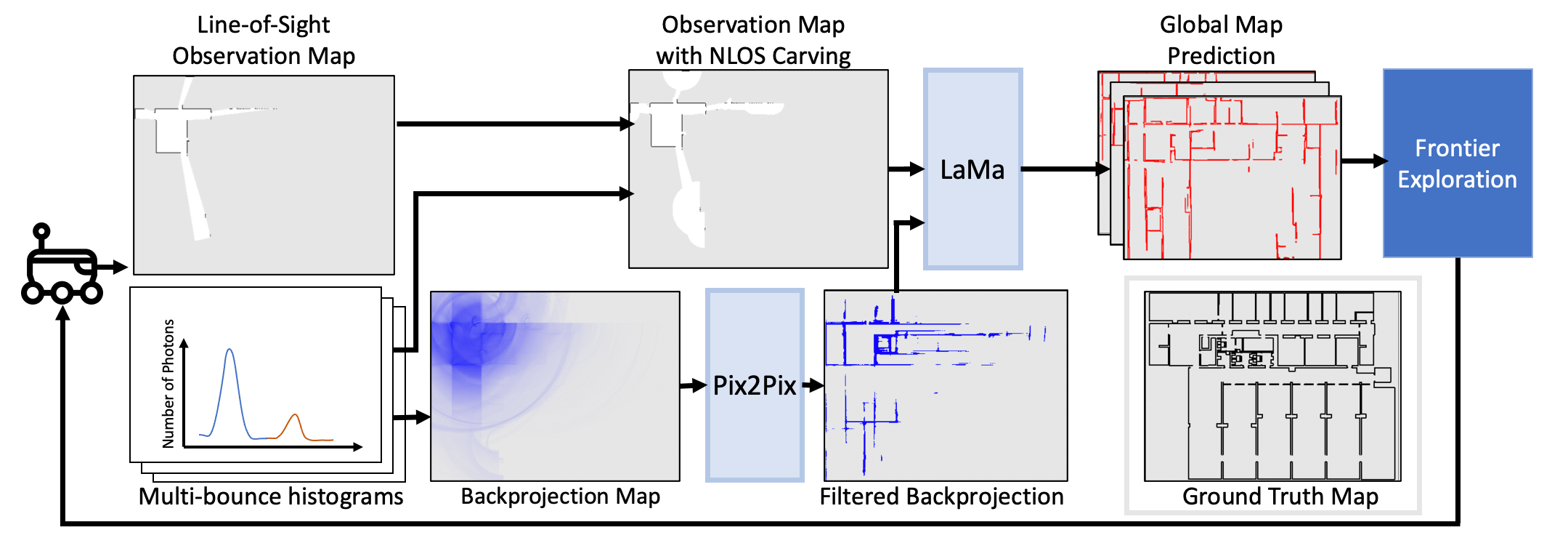
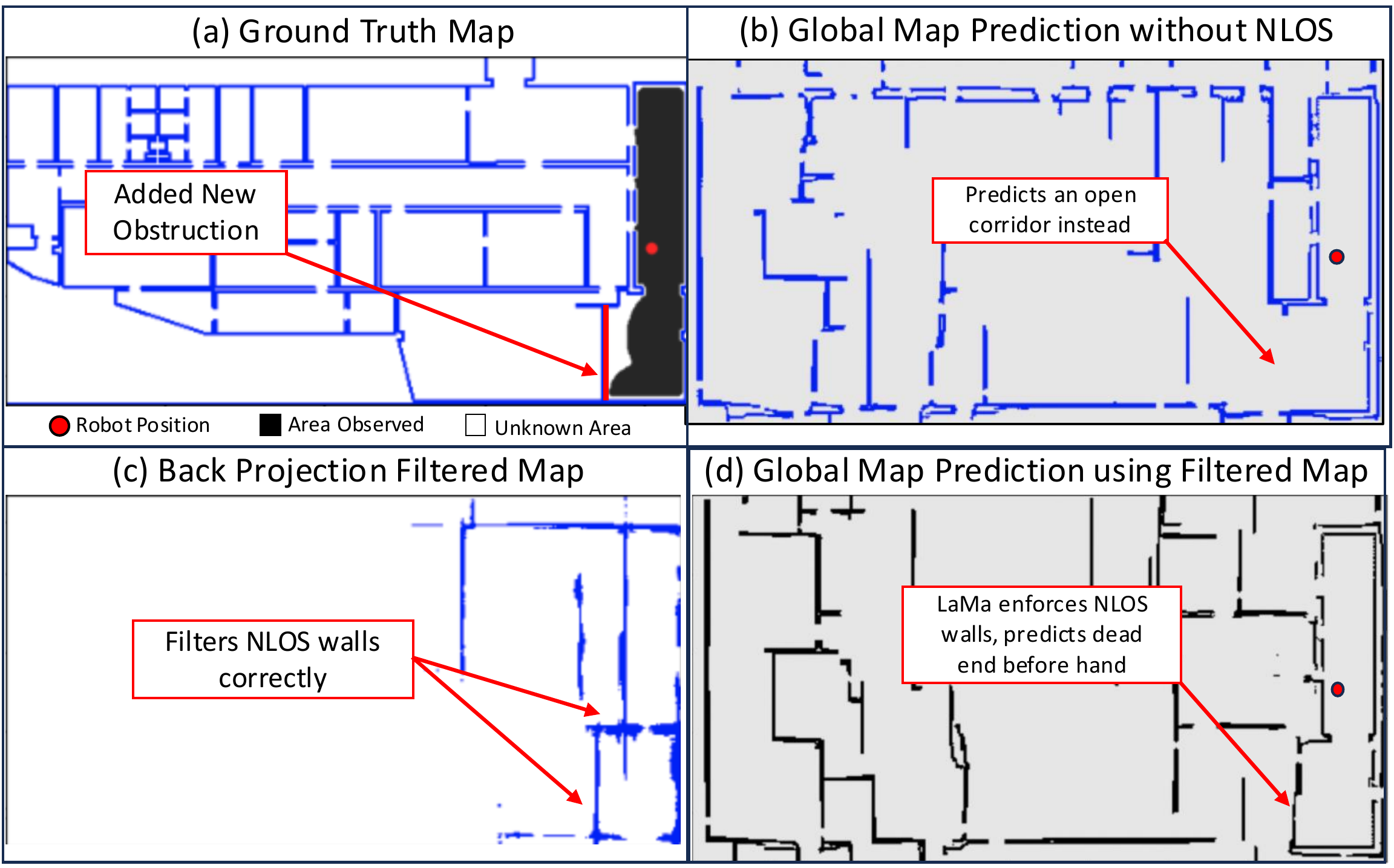
We introduce SuperEx, a framework that integrates
NLOS sensing directly into the mapping–exploration loop. SuperEx augments global
map prediction with beyond-line-of-sight cues by (i) carving empty NLOS regions from
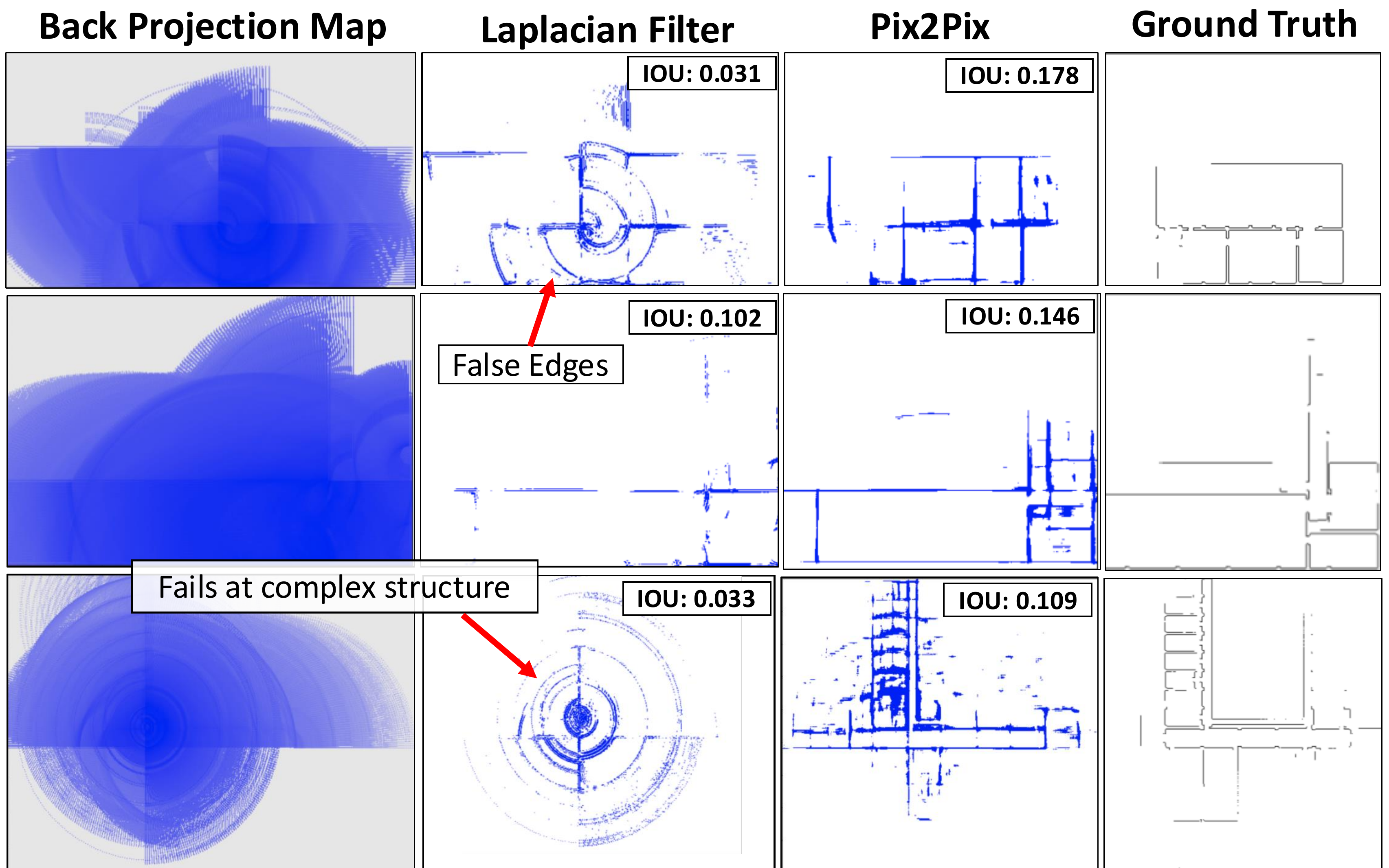
timing histograms and (ii) reconstructing occupied structure via a two-step
physics-based and data-driven approach that leverages structural regularities.
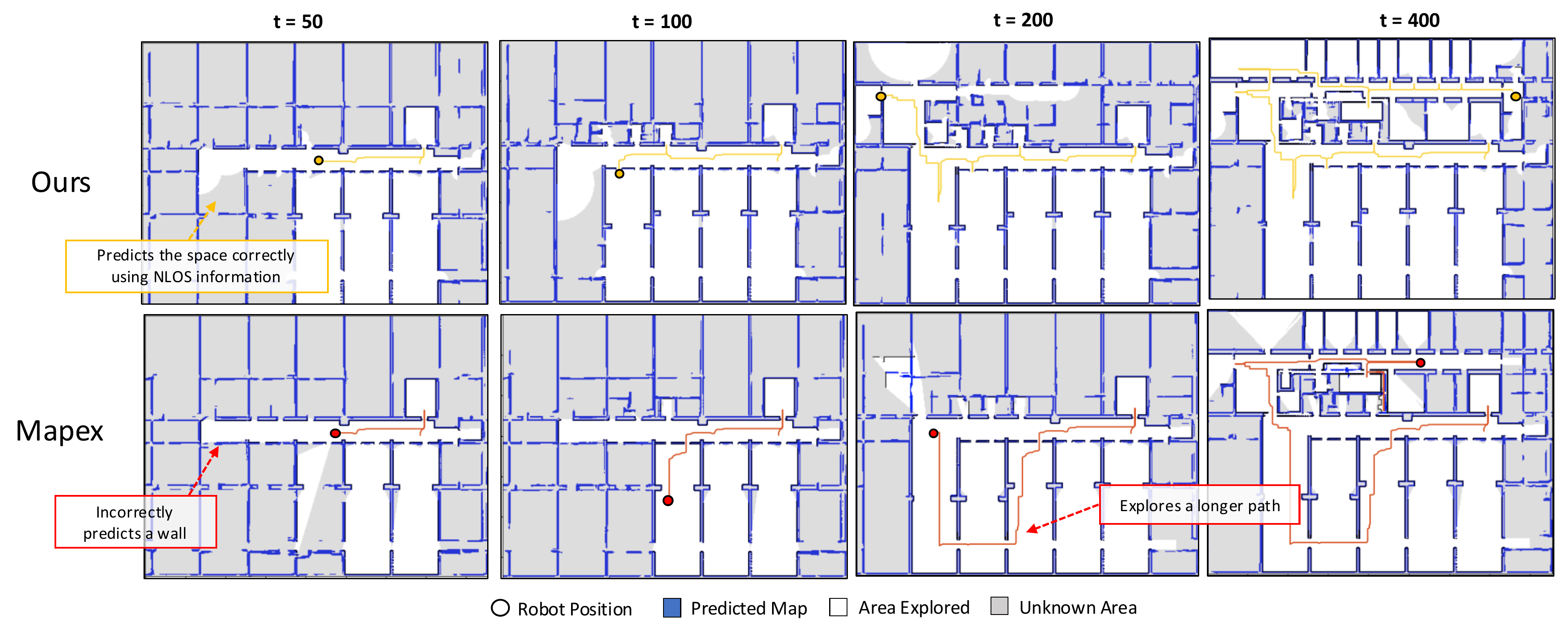
Evaluations on complex simulated maps and the real-world KTH Floorplan dataset show a
12% gain in mapping accuracy under 30% coverage and improved exploration efficiency
compared to line-of-sight baselines,
opening a path to reliable mapping beyond direct visibility.